
Kejia Chen
About Me
I am a Ph.D. candidate at the Chair of Robotics, Artificial Intelligence and Real-time Systems at the Technical University of Munich (TUM), advised by Prof. Alois Knoll and mentored by Prof. Zhenshan Bing. Before starting my Ph.D., I received my M.Sc. in Robotics, Cognition and Intelligence from TUM and my B.Eng. in Automation from the University of Electronic Science and Technology of China.
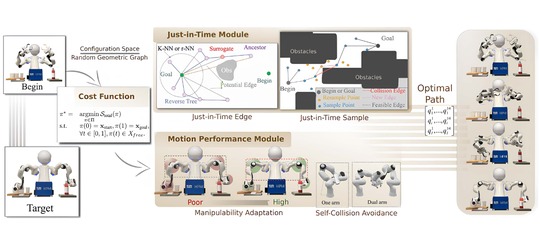
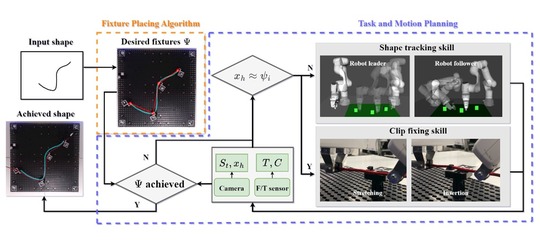
My research focuses on robot manipulation for contact-rich assembly, especially multi-robot manipulation of deformable linear objects such as cables. I am also interested in learning long-horizon manipulation plans from multimodal demonstrations with vision, tactile, force/torque, and language-model reasoning.
Selected Demos
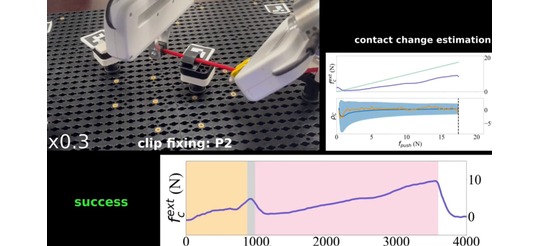
Detection and correction of insertion anomalies from contact force
Monitoring and regulation of tension force for blind manipulation
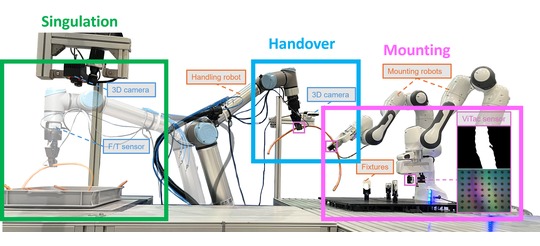
Multi-robot collaboration for singulation, handover and mounting
Cable Assembly Live Demo at Automatica 2025
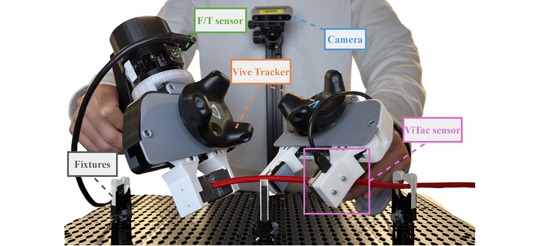
Demonstrations from teleoperation
Demonstrations from TacUMI
Publications
-
 ICRA
IEEE International Conference on Robotics and Automation (ICRA), 2026. Accepted.
ICRA
IEEE International Conference on Robotics and Automation (ICRA), 2026. Accepted. -
 IROS
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
IROS
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. -
 TMECH
IEEE/ASME Transactions on Mechatronics, 2025.
TMECH
IEEE/ASME Transactions on Mechatronics, 2025. -
 NMI
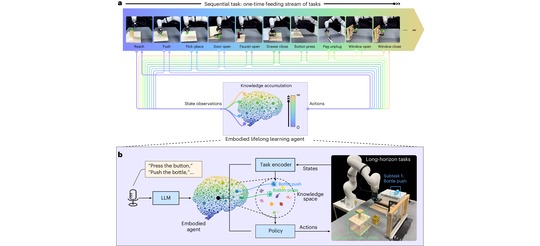
Preserving and Combining Knowledge in Robotic Lifelong Reinforcement LearningNature Machine Intelligence, 2025.
NMI
Preserving and Combining Knowledge in Robotic Lifelong Reinforcement LearningNature Machine Intelligence, 2025. -
 ICRA
IEEE International Conference on Robotics and Automation (ICRA), 2025.
ICRA
IEEE International Conference on Robotics and Automation (ICRA), 2025. -
 ICRA
IEEE International Conference on Robotics and Automation (ICRA), 2024.
ICRA
IEEE International Conference on Robotics and Automation (ICRA), 2024. -
 IROS
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
IROS
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
Skills
- Programming: Python (PyTorch), C++
- Robotics: ROS/ROS2, MoveIt/MoveIt2, Franka Panda
- Simulation: MuJoCo, robosuite, Isaac Sim
- Teleoperation and sensing: HTC Vive VR, Sigma.7 haptic device, VICON Motion Capture, UMI-style data collection
- Languages: English (IELTS 7.5), German (TestDaF 17)
Teaching
- Teaching assistant for the M.Sc. course Cognitive Systems.
- Supervisor for the M.Sc. practical course Simulation-based Machine Learning for Robotics.
- Supervised more than ten bachelor’s and master’s theses.
Powered by Jekyll and Minimal Light theme.